關注機床行業最新資訊,如需更多信息,請關注我們其他的社交平臺!
現代機床雜志 2024 第一期

訂閱電話:010-80335298









工業機器人視覺引導系統的開發與實驗分析
引言
工業機器人能夠執行重復性高、勞動強度大任務,還可在惡劣環境下持續工作,提高生產效率。隨著智能制造的發展,單純的機械執行已無法滿足復雜多變生產需求,引入視覺引導系統成為工業機器人發展方向。視覺引導系統通過集成先進圖像處理、機器學習算法,賦予機器人感知周圍環境、識別目標物體、理解任務需求能力,使工業機器人能夠在無需預先編程固定路徑情況下,根據實時視覺反饋動態調整作業姿態,執行更復雜的任務。文章設計了一種適用于工業環境的視覺引導系統,并結合實驗測試,驗證了系統在實際應用中的可靠性。
1. 工業機器人視覺引導系統架構
1.1 硬件組成
六自由度工業機器人具有較高靈活性,可在空間內部接收來自計算平臺的控制指令,靈活進行抓取、移動工作。其主要由工業CCD 相機、計算平臺、激光傳感器等構成,工作流程如圖1 所示。
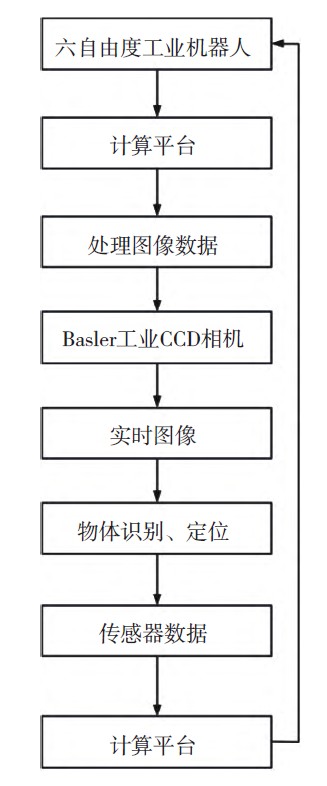
圖1 工業機器人工作流程
其中,工業CCD 相機主要用于視覺引導系統,其在物體識別、定位方面表現優異,可以為計算平臺提供高質量實時圖像。計算平臺使用NVIDIA Jetson 系列。該系列具備強大處理能力,能夠實時接收圖像數據、傳感器數據,并進行處理,將處理結果指令發送給工業機器人。激光傳感器主要用于獲取環境深度信息,提高系統對復雜環境的適應能力。
1.2 軟件部分
系統中應用的軟件模塊包括圖像處理模塊、控制算法模塊。其中,圖像處理模塊負責將相機捕獲的圖像進行預處理,利用OpenCV 庫更好地識別圖像中的邊緣信息。控制算法模塊利用PID 控制算法,實現對機器人運動路徑的精準控制。軟件間使用Ethernet 通信協議進行通信,確保各個硬件組件之間的數據實時傳輸。軟件處理流程如圖2 所示。

圖2 軟件流程
1.3 視覺引導系統的創新性
文章設計的視覺引導系統使用工業CCD 相機,能夠幫助六自由度工業機器人在復雜的環境中進行抓取與移動任務,NVIDIA Jetson 計算平臺實時對圖像和傳感器數據進行處理,提高系統響應速度。激光傳感器增強系統的智能化程度,圖像處理模塊保證識別的準確性,PID 控制算法提升機器人的運動精度。硬件與軟件的結合使得整個視覺引導系統具備良好的協同效應,實現數據的高效采集與處理,確保機器人的智能化,進而提升工作效率。
2. 實驗設計
2.1 實驗目的
本實驗的目的是驗證開發的視覺引導系統在不同工作環境,特別是不同光照條件下的穩定性和精度。通過實驗數據收集與分析,評估系統在各種光照場景下的識別性能,判斷可能存在系統瓶頸,為后續系統優化改進提供數據支持。
2.2 實驗步驟
2.2.1 系統搭建
安裝組件:組裝工業機器人,安裝工業CCD 相機,連接NVIDIA Jetson 系列計算平臺,確保所有組件接口牢固連接。
軟件配置:在計算平臺上安裝操作系統、圖像處理軟件、控制算法程序、相關依賴庫,完成系統參數配置,包括相機設置、網絡通信協議、算法參數調優等,確保系統能夠穩定接收、處理圖像數據并控制機器人動作。
2.2.2 實驗設置
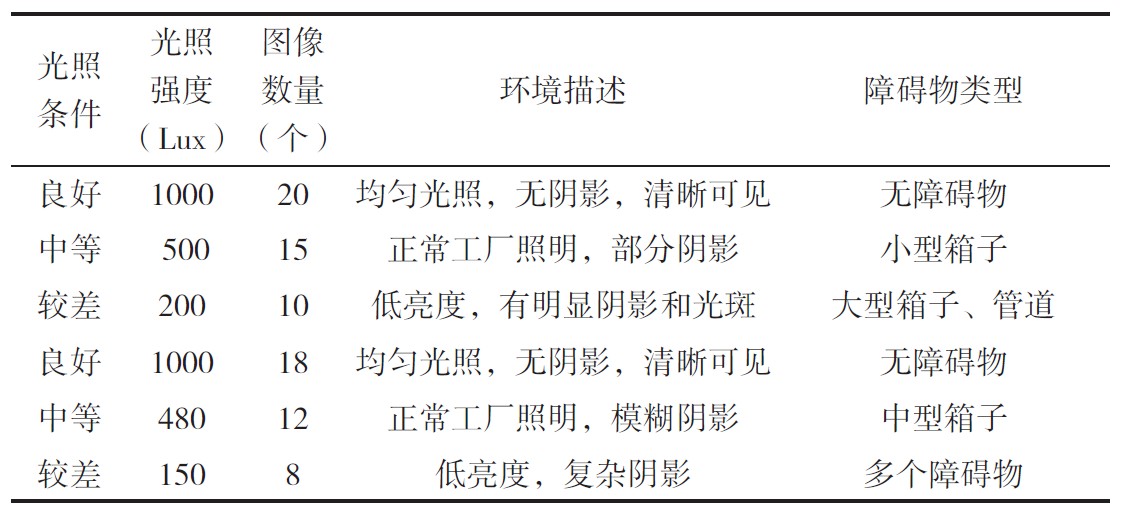
(1)在實驗中模擬工業生產環境中多種光照條件場景,以評估視覺引導系統在不同環境下的表現。使用日光燈模擬良好光照條件:高亮度、均勻光照;中等光照條件:正常工廠照明,工業環境光;較差光照條件:低亮度環境,存在陰影或光斑。布置不同的障礙物,如箱子、管道等,模擬復雜工作環境中設備故障帶來的影響,評估系統在各種場景下的表現,實驗數據見表1。
表1 光照條件實驗數據
根據不同光照條件下,得到機器人定位準確性和運動時間數據,見表2。
表2 不同光照條件下機器人定位準確性和運動時間
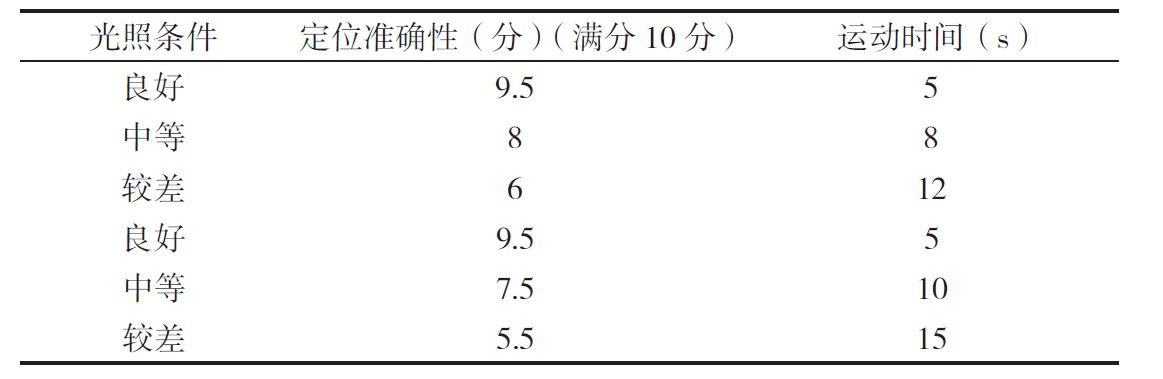
定位準確性分析:良好光照條件下定位準確性評分均為9.5,在該條件下,機器人能夠準確識別定位目標,幾乎沒有誤差;中等光照條件下定位準確性評分為5~8,表明環境中陰影和障礙物對機器人定位造成影響,但仍然能夠較好地完成任務;較差光照條件下定位準確性評分最低,僅為5.5~6,在低亮度和復雜陰影下,機器人定位準確性下降,導致選擇錯誤路徑。
運動時間分析:良好光照條件中運動時間為5s,表明機器人能夠快速有效地完成任務;中等光照條件下運動時間增加至8~10s,由于環境條件變化,機器人需要更多的時間進行定位決策;較差光照條件下運動時間增加,達到12~15s,復雜環境導致機器人的操作效率低。
(2)為進一步觀察障礙物數量對視覺引導系統性能的影響,在每個實驗組中,按照預設的障礙物數量進行設置,使用CCD 相機拍攝測試區域的初始圖像,并傳輸至視覺引導系統,啟動視覺引導系統,觀察并記錄機器人在不同障礙物數量下的路徑規劃過程、定位準確性及系統響應時間,機器人完成任務后,記錄總運動時間,并進行數據分析。
在良好光照條件、中等光照條件、較差光照條件下分別測試障礙物數量為5、10、15 的情況,障礙物類型包括箱子、管道、托盤等,隨機布置增加復雜性,不同障礙物數量對視覺引導系統影響的實驗數據見表3。
表3 不同障礙物數量實驗數據
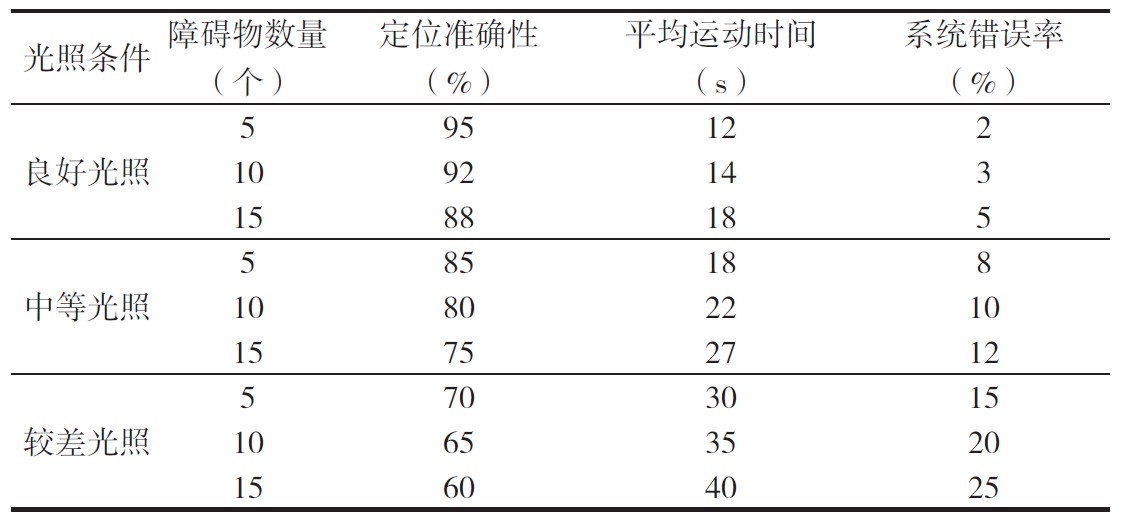
由表3 可以看出,隨著障礙物數量增加,定位準確性下降,在良好光照條件下,障礙物數量為15 個時,準確性下降至88%,在較差光照條件下,準確性降至60% ;障礙物數量增加導致系統需要更多時間進行路徑規劃調整,平均運動時間增加,在光照良好情況下,15 個障礙物平均運動時間為18s,而在較差光照條件下,運動時間達40s;障礙物數量增加導致系統錯誤率上升,在較差光照條件下,15 個障礙物錯誤率高達25%。
實驗結果表明,障礙物數量對視覺引導系統的性能產生影響,障礙物增加不僅降低了定位準確性,還延長了運動時間,增加系統的錯誤率,在實際應用中,應合理規劃工作環境中的障礙物布局,優化視覺引導系統的算法,提高機器人的工作效率。
3. 視覺引導系統應用案例
某倉儲物流公司訂單量日益增長,將設計的視覺引導系統應用其中,以提高揀貨速度,降低人工成本。
實施步驟:將視覺引導系統與該公司現有倉儲管理系統集成,實現數據共享與實時監控,對操作人員進行系統培訓,確保他們能夠熟練掌握新系統的操作,相關實驗數據見表4。
表4 實驗數據
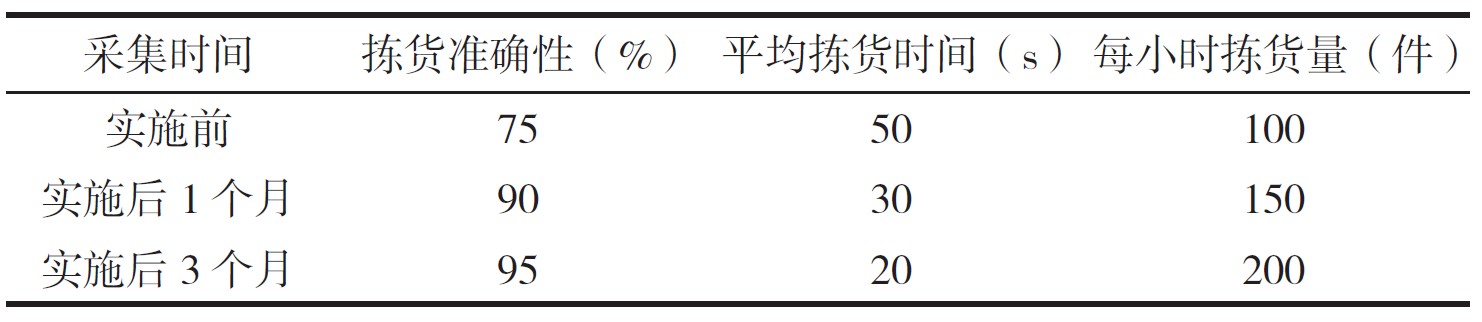
經過系統實施,實施前揀貨準確性為75%,表明每4個訂單中將有1 個出現錯誤,實施后1 個月準確性提升至90%,錯誤率明顯下降,客戶滿意度恢復,實施后3 個月準確性進一步提升至95%。
平均揀貨時間縮短,實施后1 個月時間縮短至30s,揀貨效率提升,實施后3 個月平均揀貨時間進一步縮短至20s,提高了工作效率。
實施前每小時只能完成100 件揀貨,無法有效應對高峰期的訂單量,實施后1 個月揀貨量提高至150 件/h,表明系統效率得到驗證,實施后3 個月揀貨量達到200 件/h,能夠滿足市場需求快速變化。
4. 優化建議
(1)改善光照條件:在實際應用中,盡可能提升光照條件,確保環境光線均勻且充足,減少陰影干擾。
(2)采用多傳感器融合技術:結合紅外傳感器等多種傳感器,提高機器人在復雜環境下的環境感知能力,彌補光照不足帶來的影響。
(3)動態調整策略:設計動態光照調整系統,如在較差光照條件下增加光源,改善環境條件,提升機器人性能。
基于以上優化建議,進行驗證測試,選擇不同光照條件下多個場景進行對比,在均勻光照條件下,識別準確率提高20%,定位精度提升15%,系統錯誤識別率從35% 降至15%,表明改善光照條件有效提高系統的整體性能。在視覺引導系統中融入紅外傳感器、超聲波傳感器等,在光照均勻的情況下,物品識別率提高到95%,光照不均勻情況下,識別率達到85% ;動態光照調整系統能夠在1s 內自動調節光源,將識別準確率保持在85% 以上。
由此可見,改善光照條件能提升機器人在實際應用中的識別定位能力;多傳感器融合技術可增強系統在復雜環境中的適應性,尤其是在光照不足的情況下;動態光照調整策略能保證機器人在不同環境條件下的性能穩定性,提升整體操作效率。
新入駐企業
-
寧波佳鈺機械設備有限公司
入駐:2026-02-23
-
無錫飛翔機床附件有限公司
入駐:2026-02-22
-
納載智能科技(浙江)有限公司
入駐:2026-02-22
-
滄州市太和機床部件有限公司
入駐:2026-02-22
-
江蘇寧興恒力智能設備有限公司
入駐:2026-01-14

展會追蹤
-
2026河北國際機床展覽會
舉辦:2026-03-26 至 2026-03-29
-
2026中部(鄭州)裝備制造業博覽會
舉辦:2026-04-01 至 2026-04-03
-
成都國際工業博覽會邀請函
舉辦:2026-03-11 至 2026-03-13
-
2025(第十一屆)航空材料與制造工藝國際論壇
舉辦:2025-12-04 至 2025-12-05
-
2025(第四屆)新能源航空國際論壇
舉辦:2025-11-13 至 2025-11-14